日前,36365线路检测中心入口国凯课题组在电气和电子工程师协会主办的机电领域Top期刊IEEE Transactions on Industrial Electronics(中科院JCR期刊1区,IF=7.503)上发表论文,题目为“Composite Learning Robot Control With Friction Compensation: A Neural Network-Based Approach”,该成果于2020年1月入选为Web of Science高被引论文。36365线路检测中心入口国凯助理研究员为论文第一作者,36365线路检测中心入口为第一完成单位。该项工作得到了国家自然科学基金面上项目、青年项目,山东省重点研发计划和36365线路检测中心入口青年学者未来计划等项目的资助。
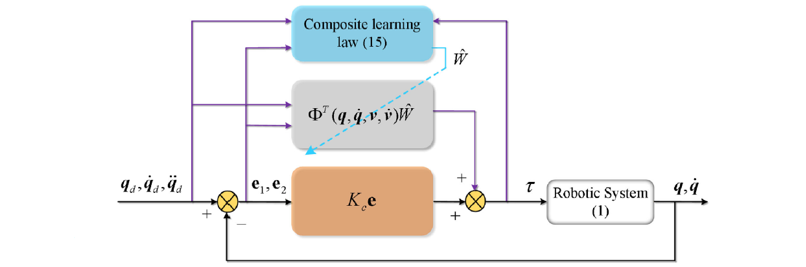
由于机器人系统存在复杂的非线性特性,系统中的未建模动态和外干扰会对高性能轨迹跟踪控制产生较大不利影响。在传统的机器人自适应控制方法中,多基于持续激励条件假设,导致控制结果较为保守,适用性受到限制。在该研究中,国凯课题组针对机器人高性能轨迹跟踪控制中的未知参数精确建模、辨识及补偿问题,提出了一种神经网络复合学习控制方法。针对系统未知参数进行在线复合自适应学习,通过历史数据和在线数据并联驱动未知参数实时更新,在interval-excitation条件下即可保证参数估计值收敛。针对复合学习过程中的变量替换问题,提出了分区神经网络控制结构,提高了非线性不确定项的学习精度,避免了对系统信号高阶导数项的需求,提高了闭环系统的鲁棒性。该工作证明了神经网络复合学习控制方法的有效性和优越性,为机器人高性能控制提供了新思路。
在过去几年内,该课题组在机器人、机电系统非线性控制等方面进行了深入研究,连续在机电领域的多个著名期刊Automatica、IEEE Transactions on Industrial Electronics、Automation In Construction等发表多篇高水平论文。
相关链接:https://ieeexplore.ieee.org/document/8584486